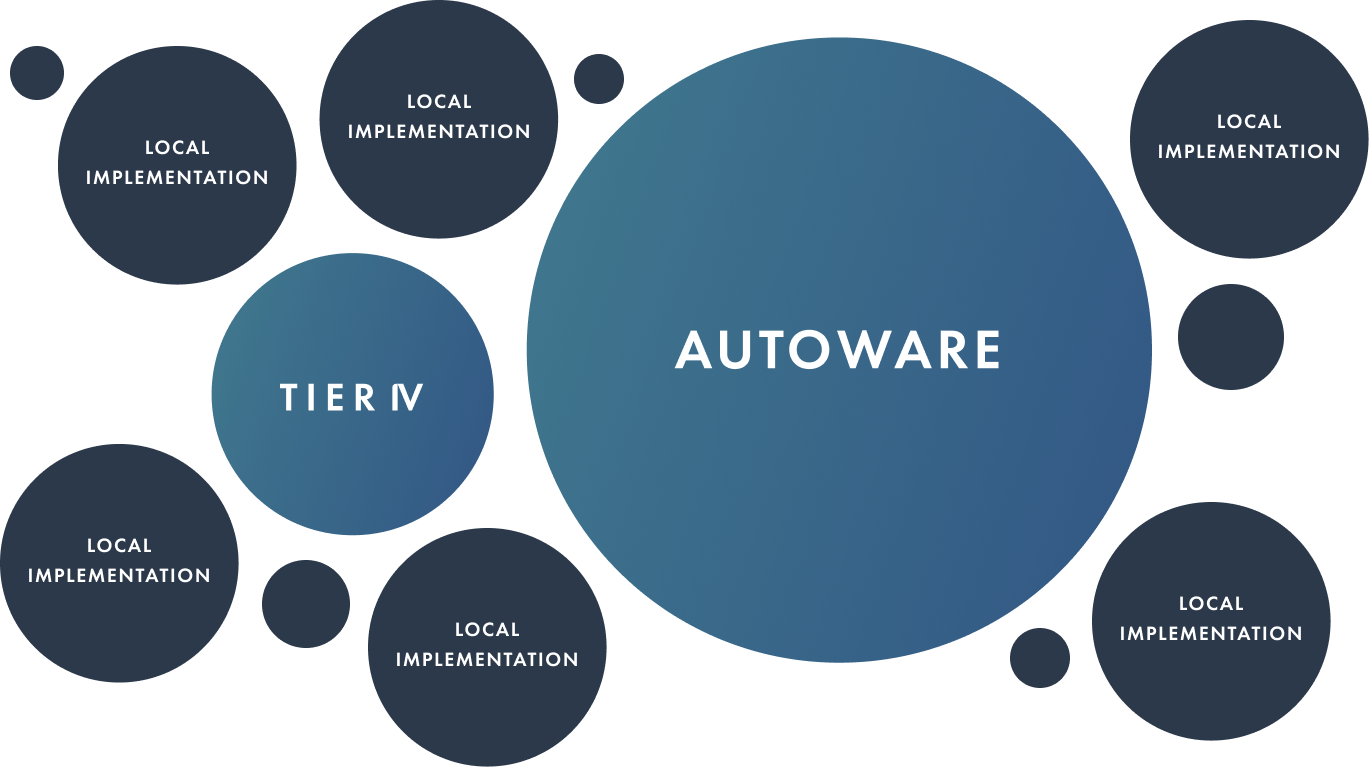
Autoware is designed to run on wide variety of hardware platforms. There is no other autonomous driving software that can be applied to as many types of ECU, sensors and vehicles as Autoware. We offer various services such as integration, risk management and fleet operation.
SENSING
Data is collected from LiDAR, Camera, GNSS, IMU, and other sensors mounted on the autonomous vehicle
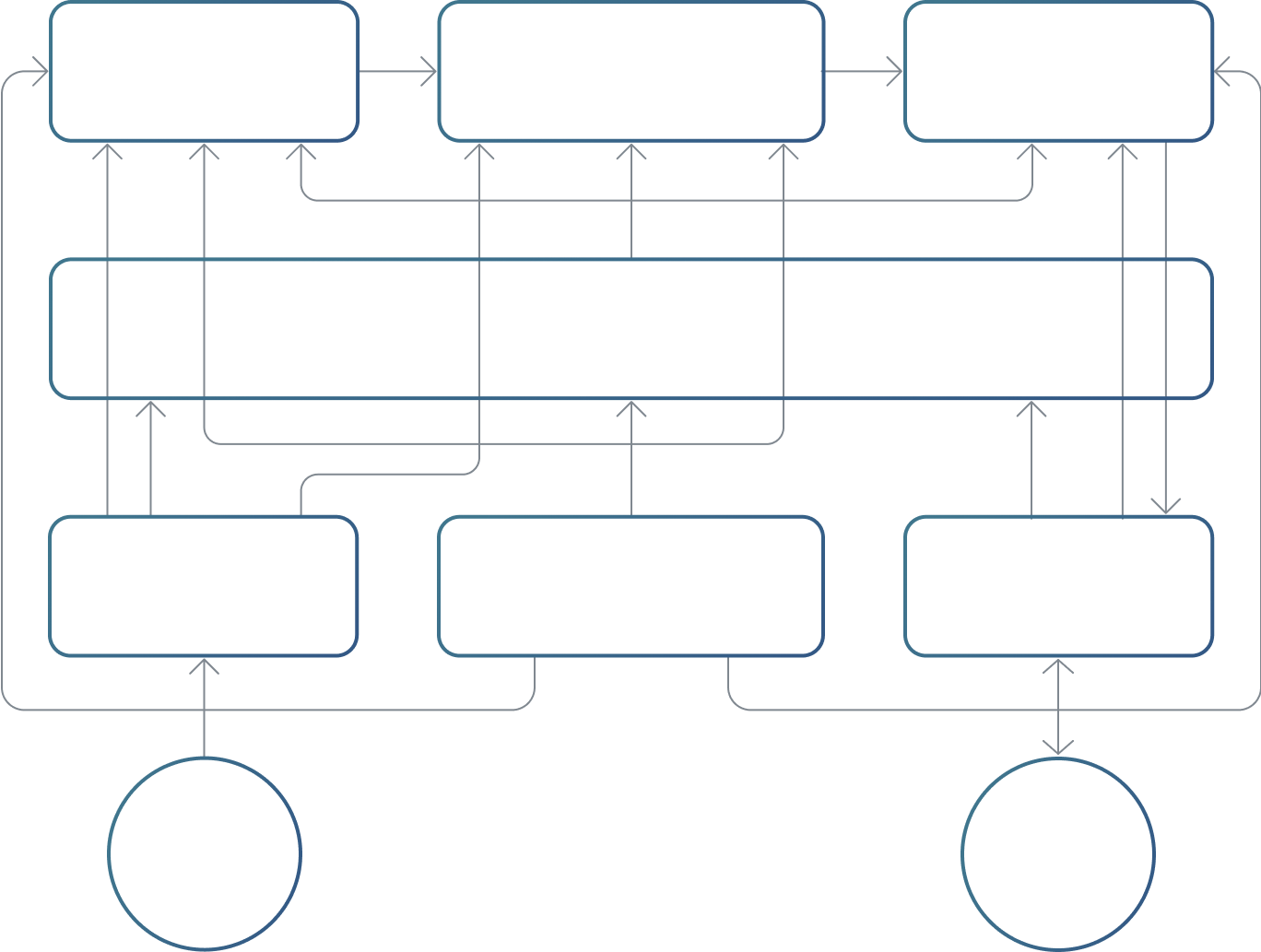
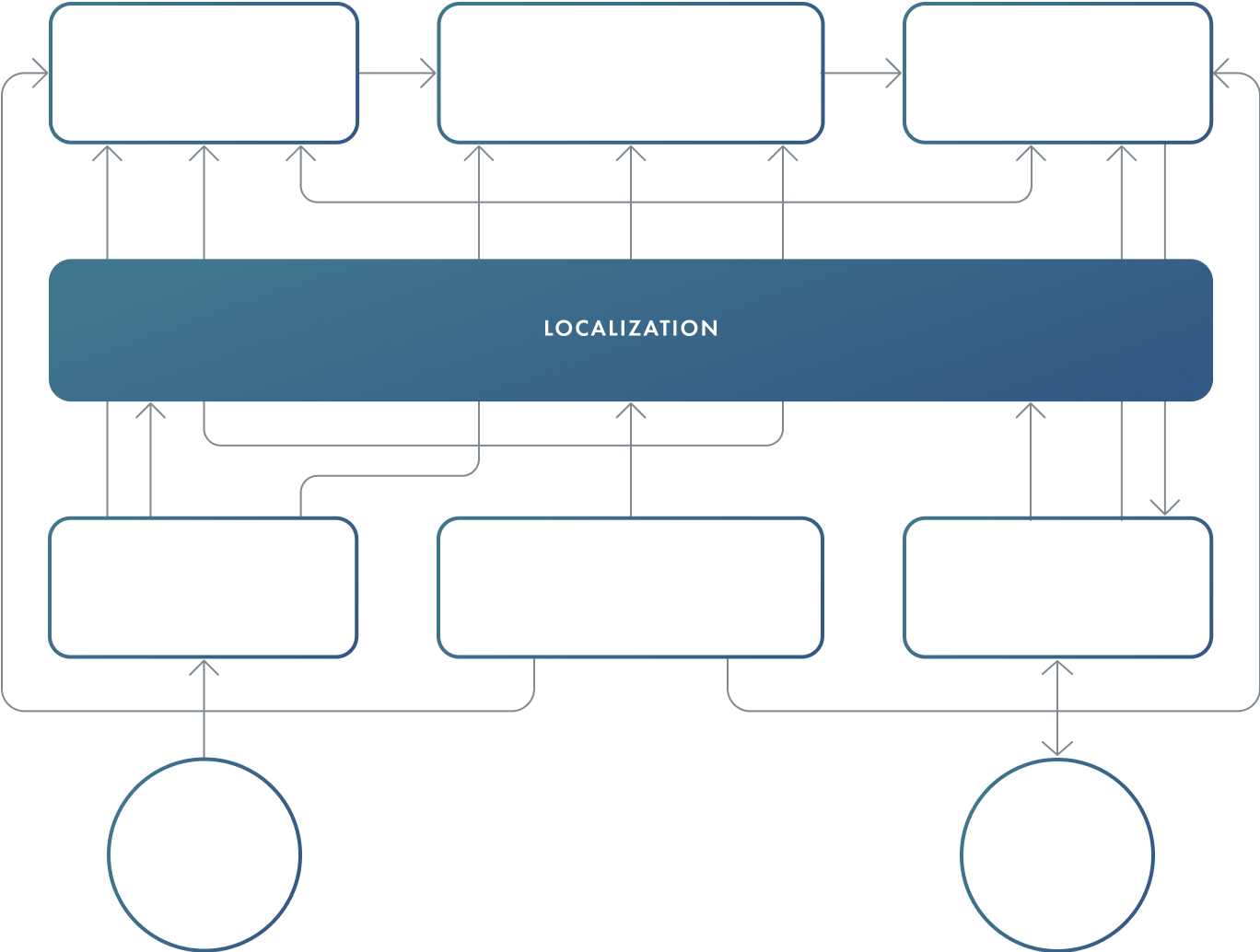
LOCALIZATION
Sensor data, along with high precision map data is used to determine the precise location and orientation of the autonomous vehicle.
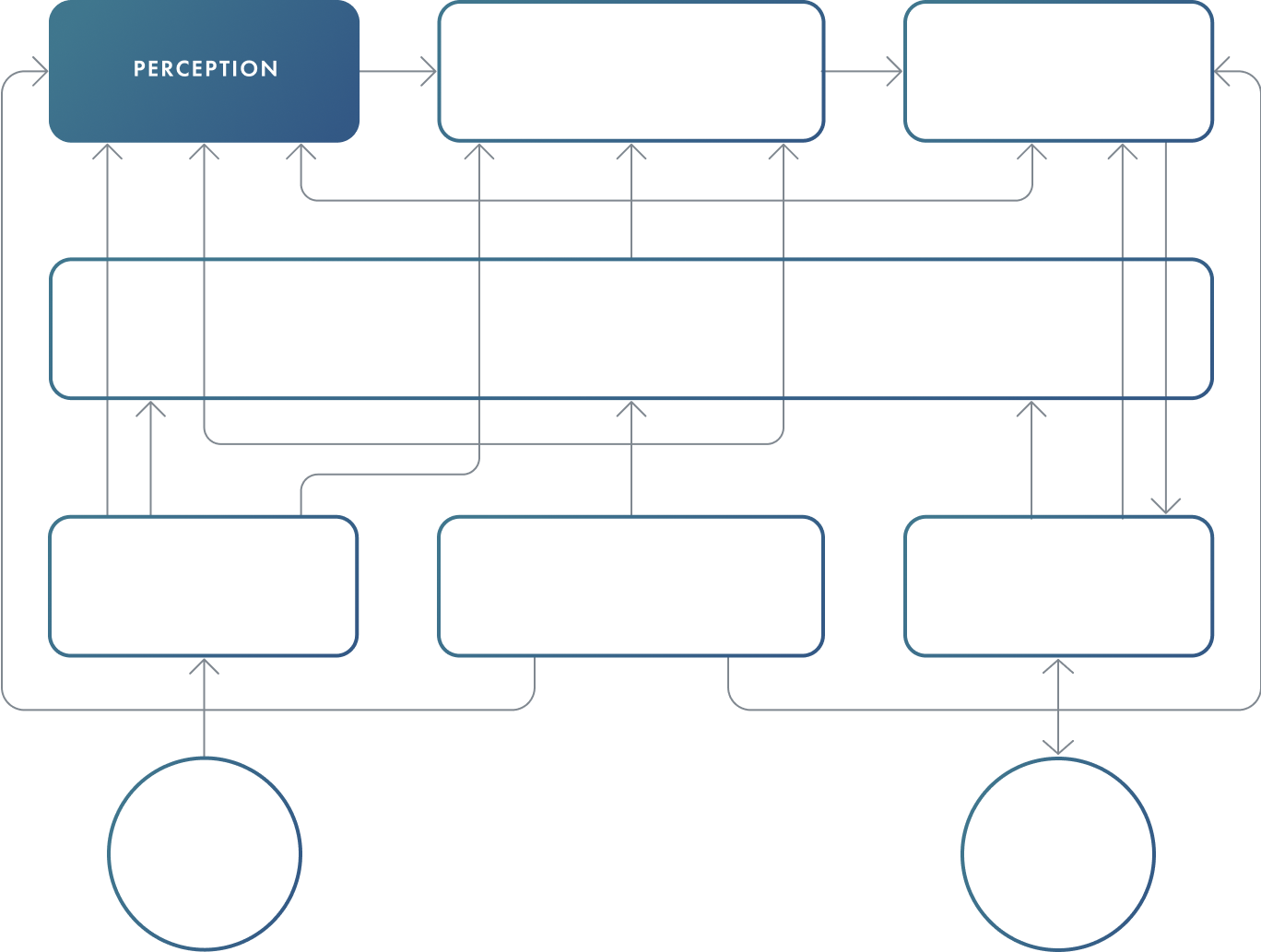
PERCEPTION
Detection, recognition and tracking the movement of objects such as vehicles, bicycles, and pedestrians, as well as the identification of traffic signals and signs.
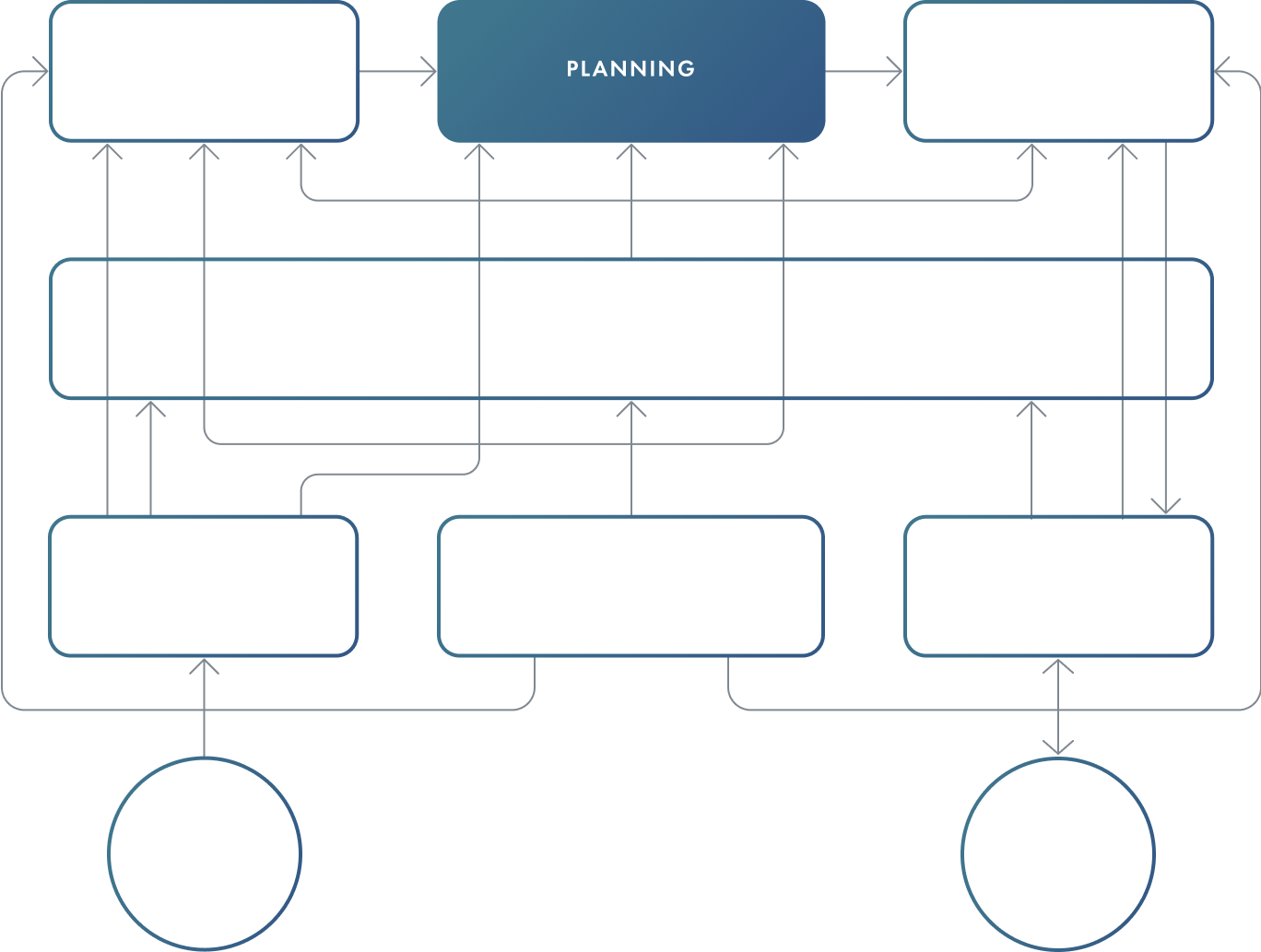
PLANNING
Calculates the path of the Intelligent vehicle along desired route using perceptual information to avoid any objects and/or obstacles.
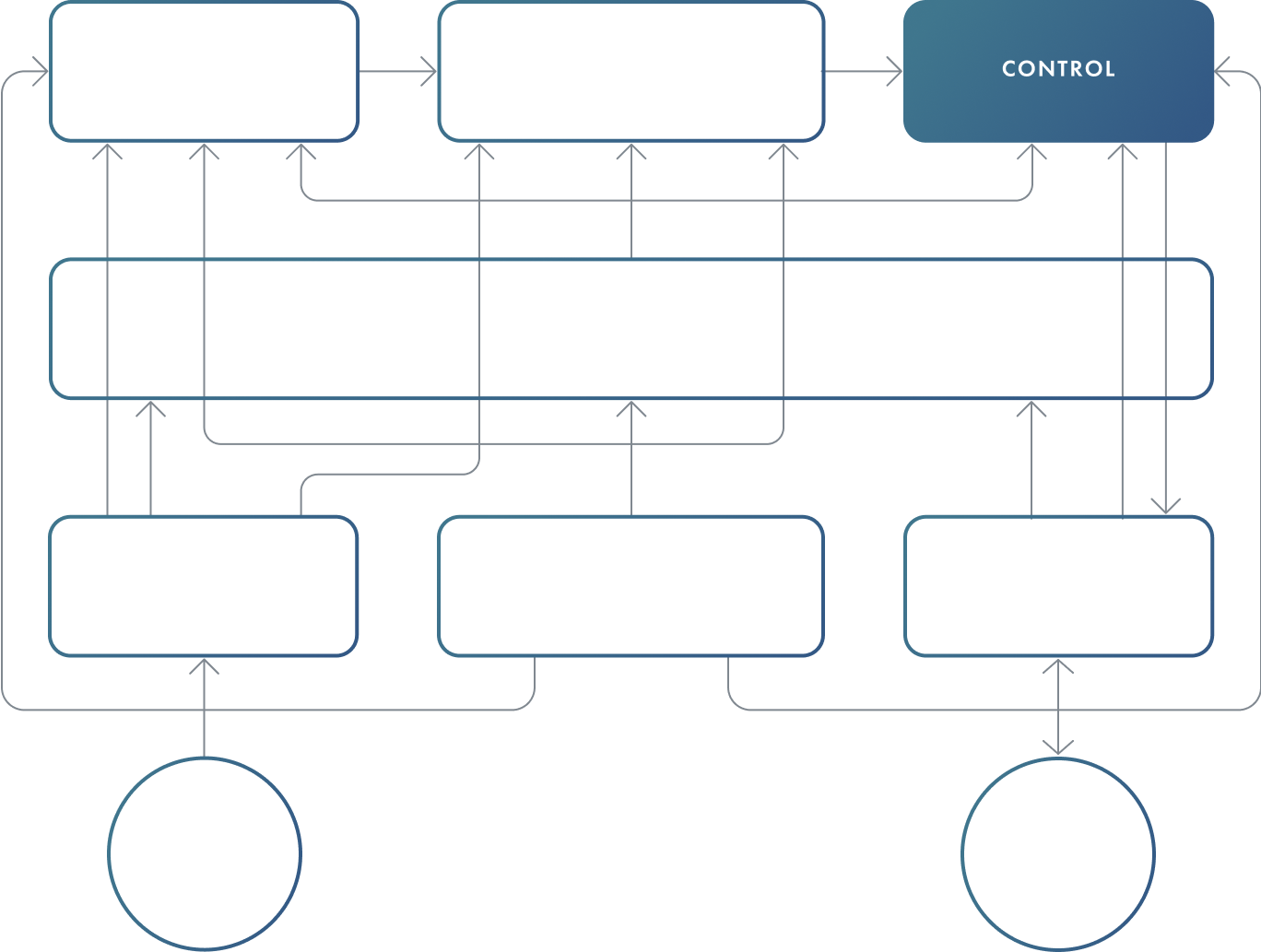
CONTROL
Planning information is converted into precise vehicle controls (steering angle, braking, acceleration) and sent through the Vehicle Interface.
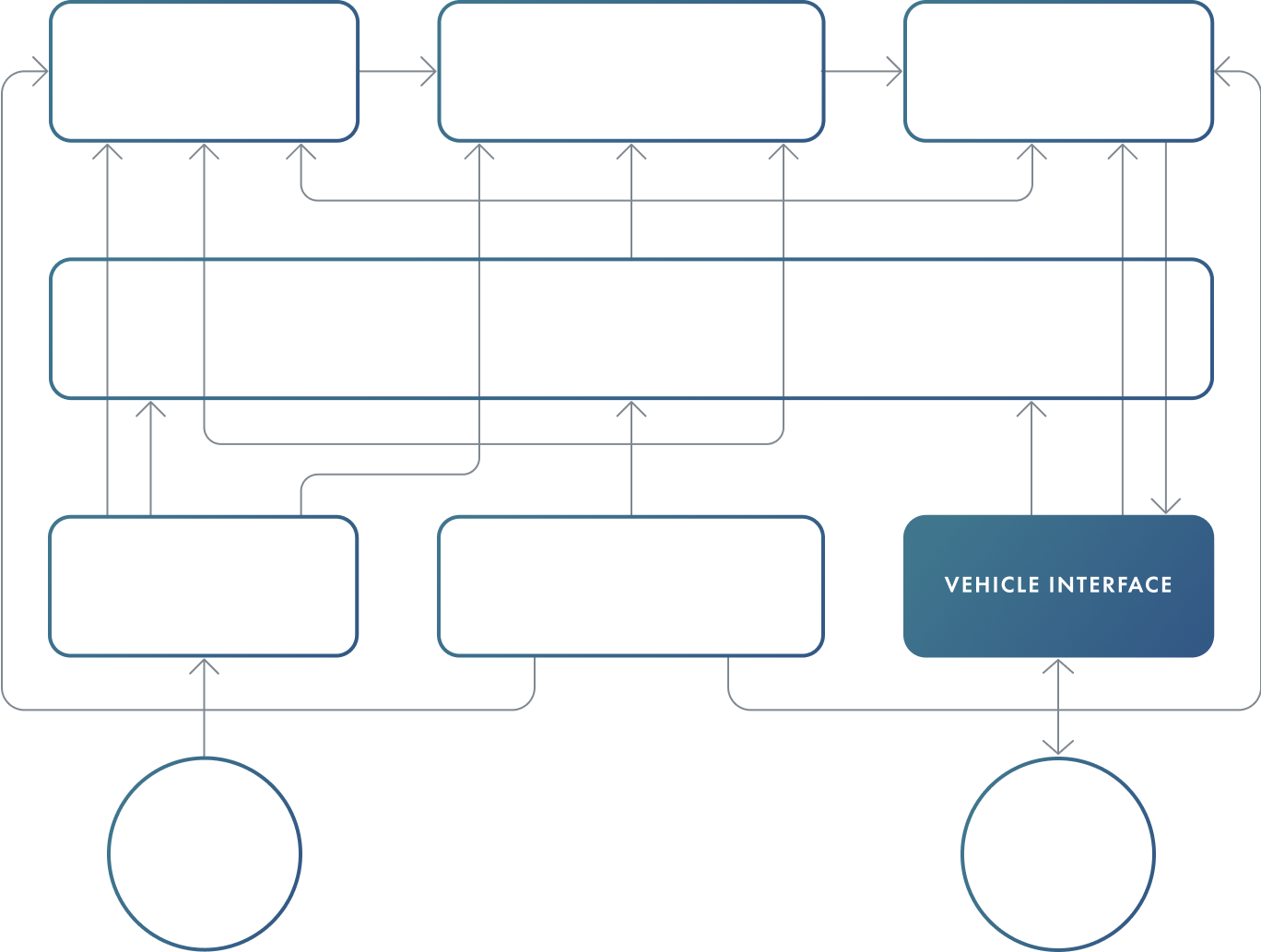
VEHICLE INTERFACE
Convert the control signals into commands according to various vehicle characteristics.
MAP DATA
Utilize high-precision 3D mapping to provide information about the environment.