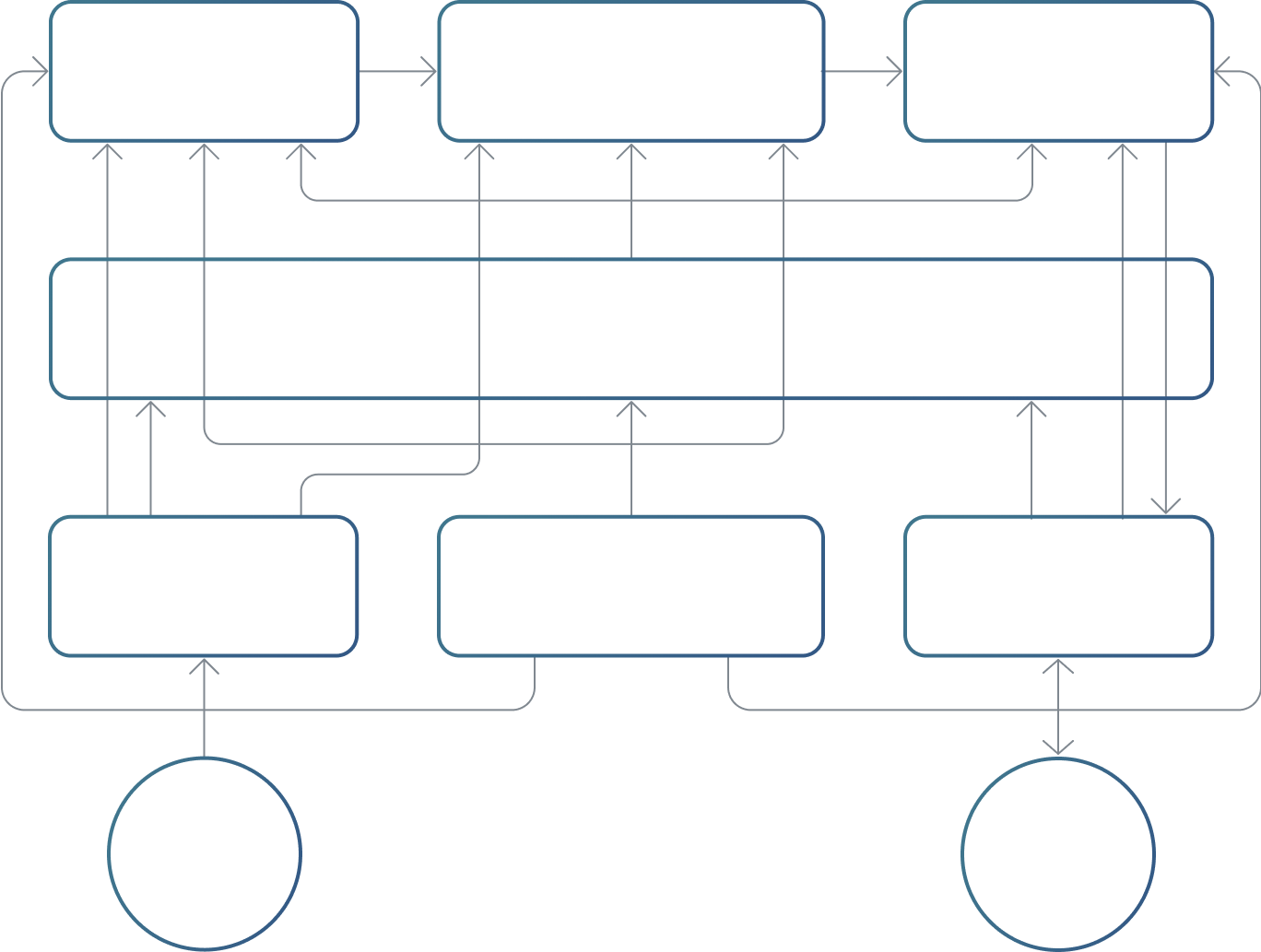
Autoware的设计适合在各种硬件平台上运行。没有其他自动驾驶软件像Autoware一样可应用于多种类型的ECU、传感器和车辆。我们提供各种各样的服务,例如整合、风险管理和车队运营。
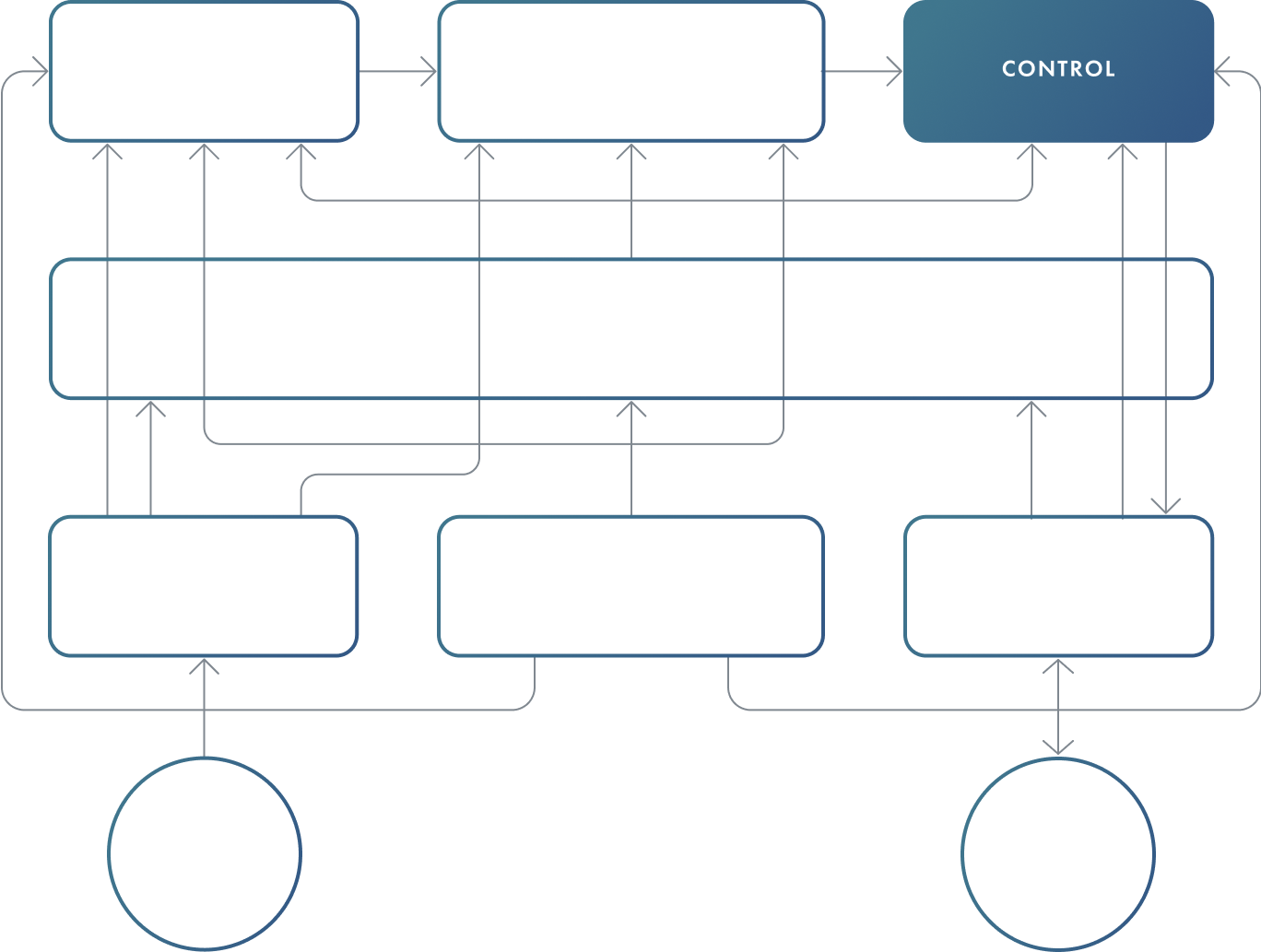
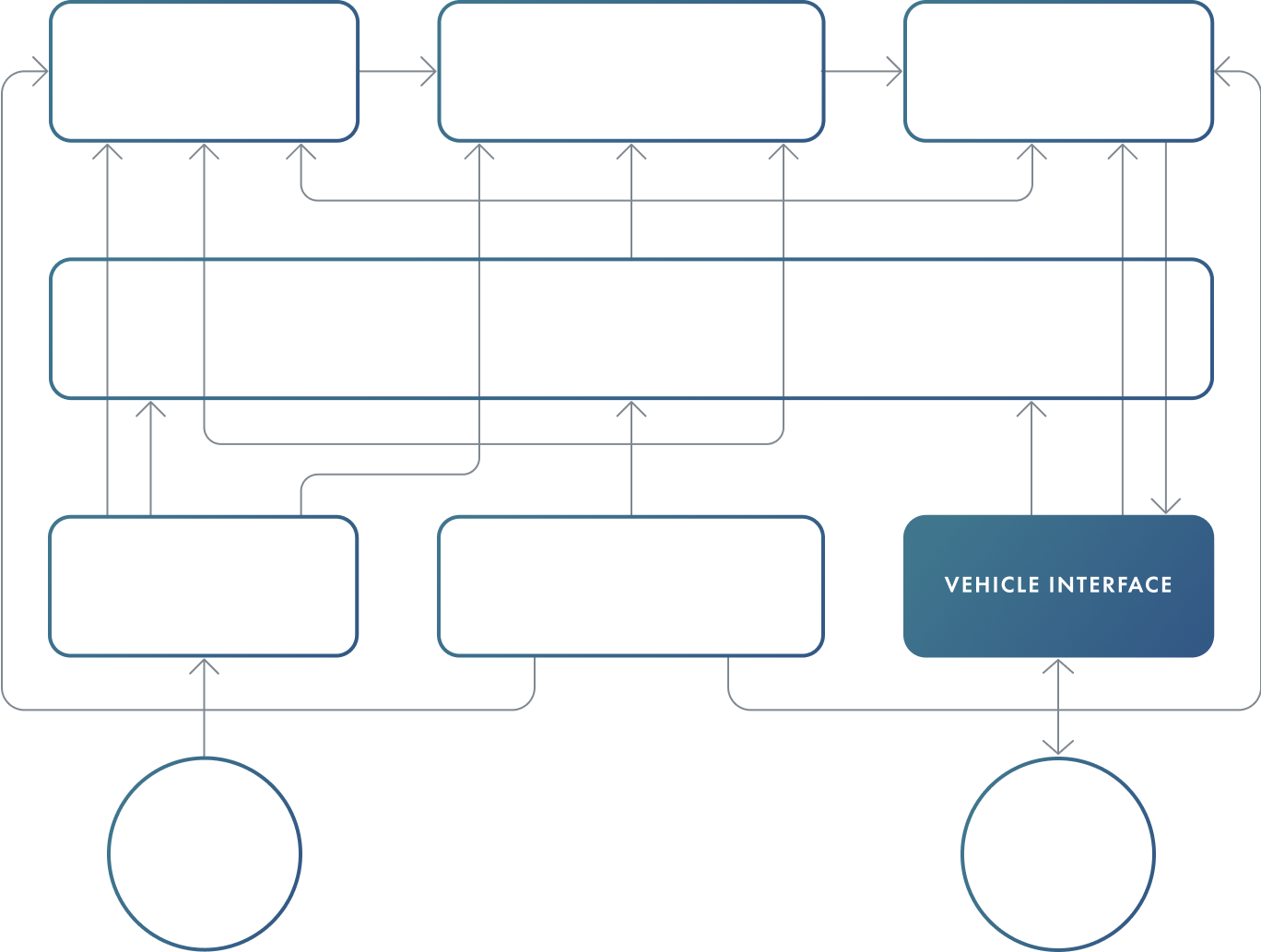
SENSING
从安装在自动驾驶车辆上的激光雷达、摄像头、GNSS、IMU和其他传感器收集数据。
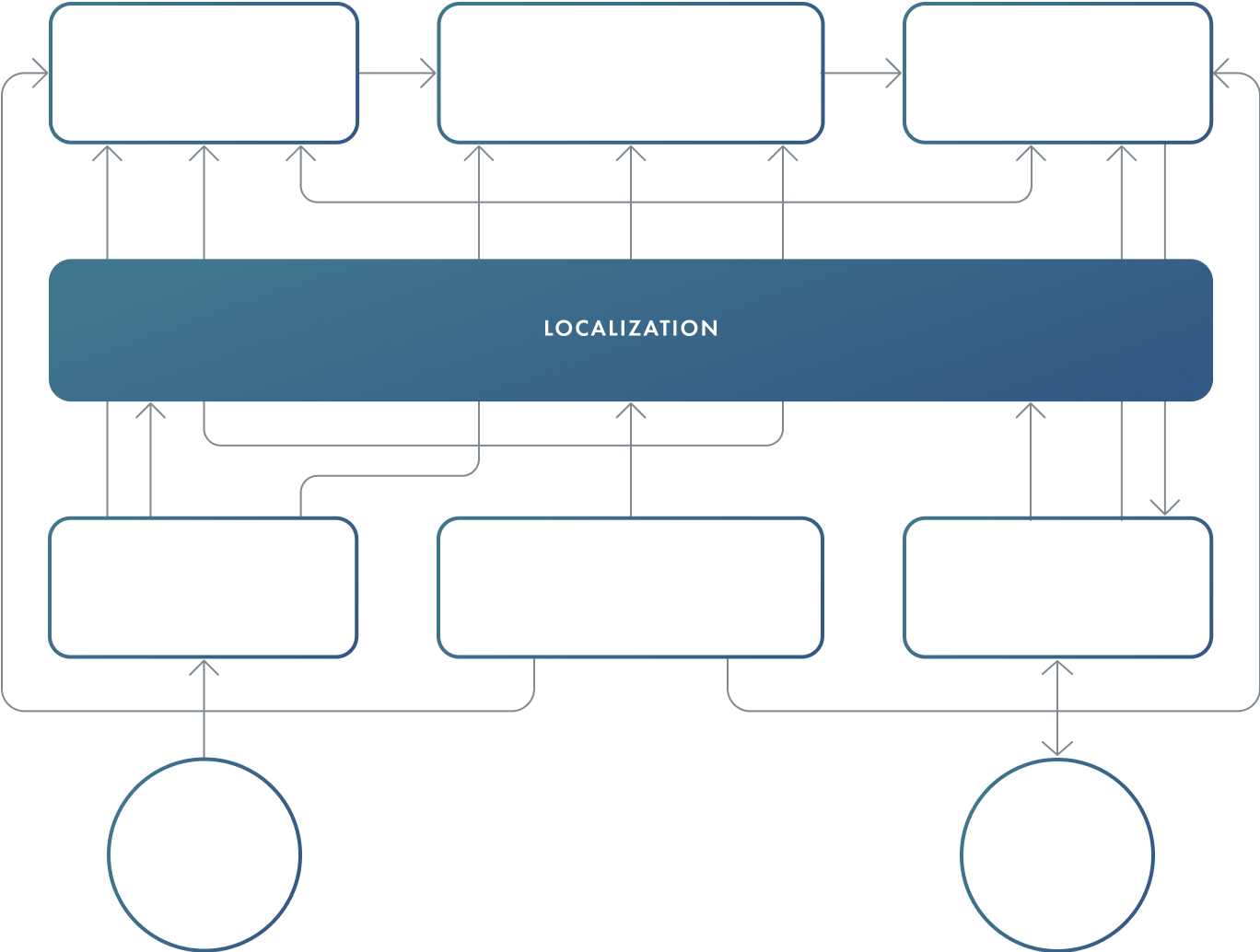
LOCALIZATION
使用传感器数据以及高精度地图数据来确定自动驾驶车辆的精确位置和方向。
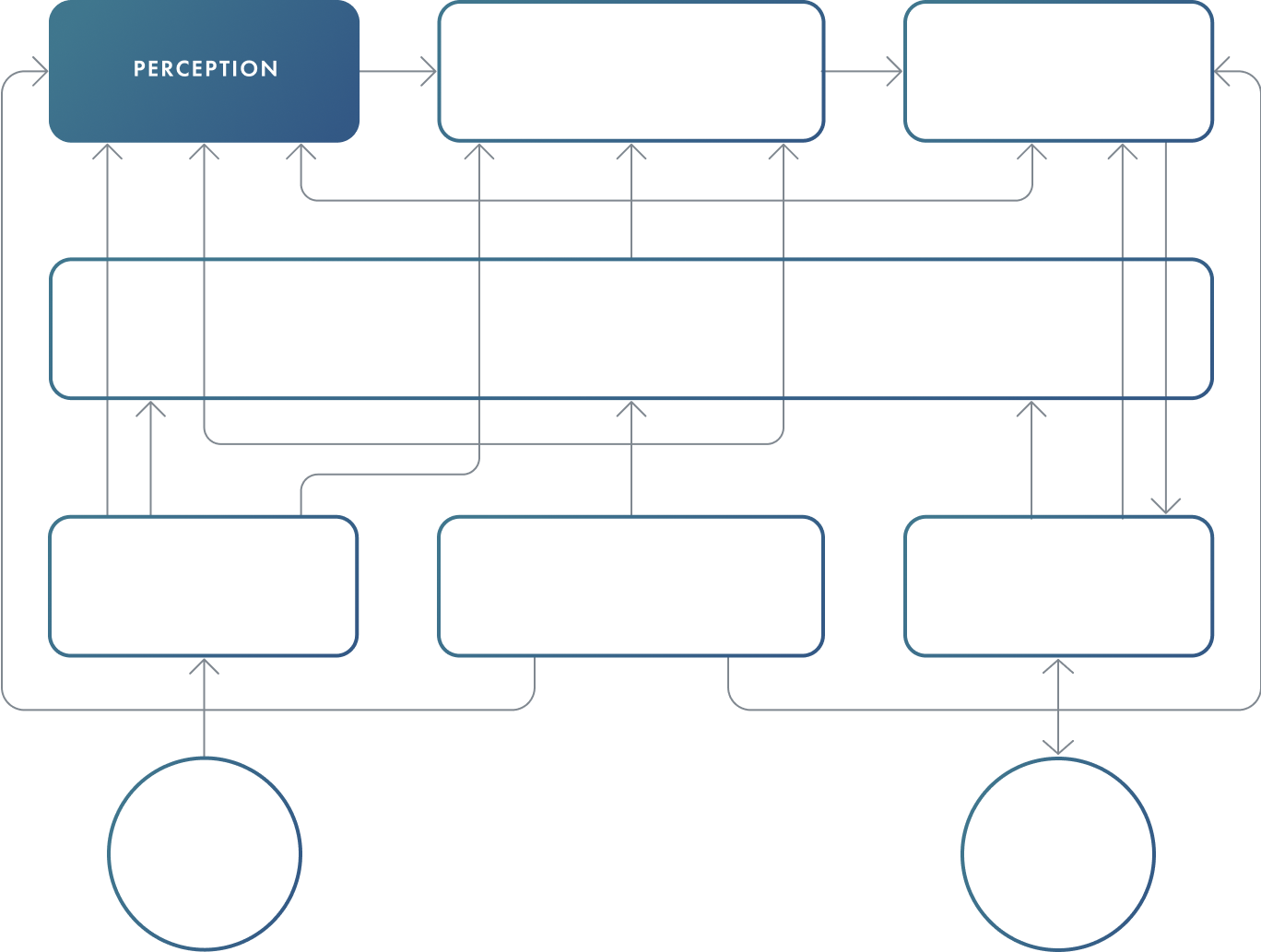
PERCEPTION
探测、识别和跟踪车辆、自行车和行人等物体的运动,并识别交通信号和标志。
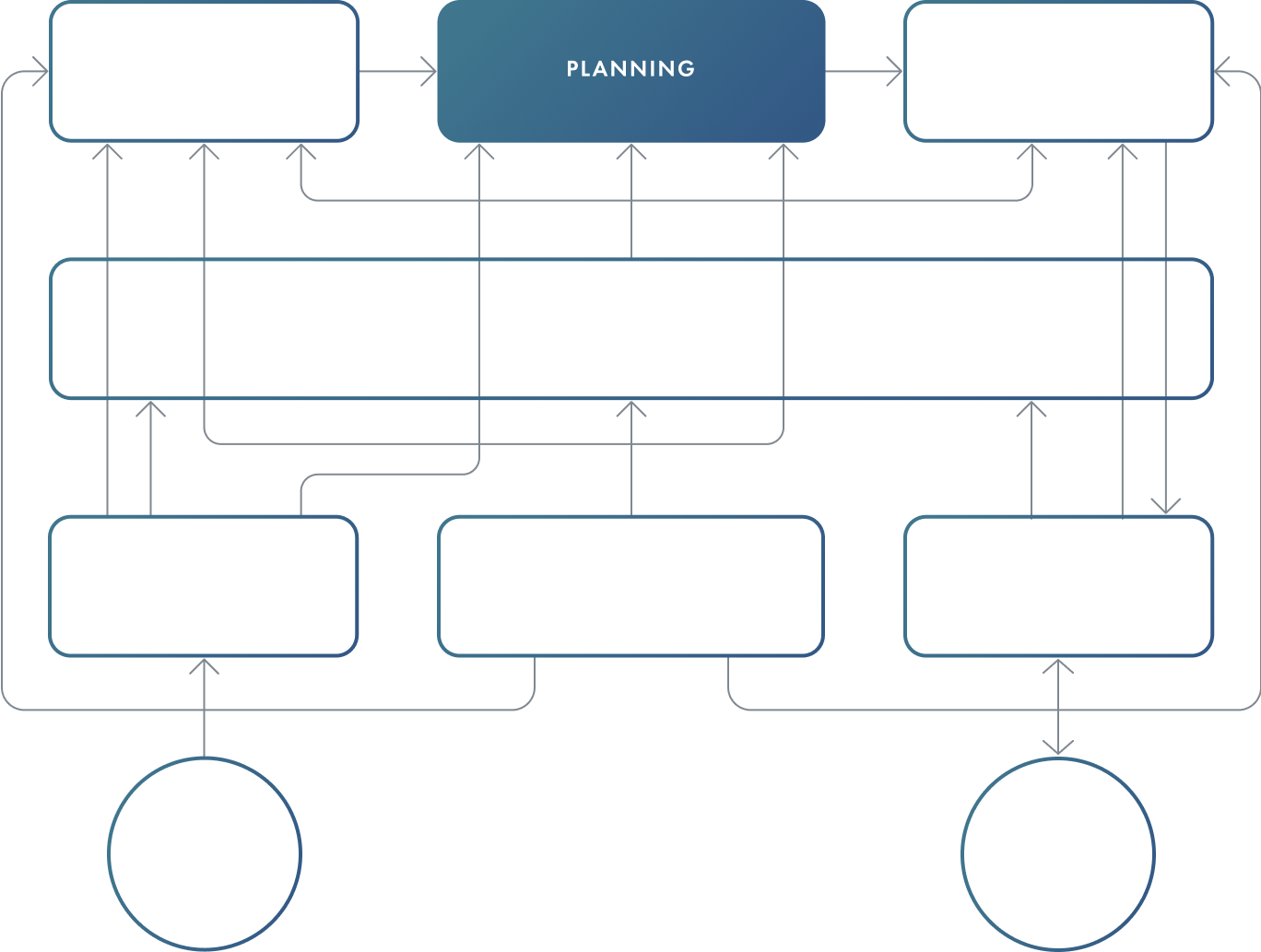
PLANNING
使用感知信息,计算自动驾驶汽车沿预期路线的路径,以避开任何物体和/或障碍物。
CONTROL
将规划的路径信息转换为精确的车辆控制(转向角、制动、加速)并通过车辆接口发送。
VEHICLE INTERFACE
根据各种车辆特性将控制信号转换为指令。
MAP DATA
利用高精度3D mapping技术提供环境信息。