⼀般的に、⾃動運転システムは、LiDARやカメラ、GNSS、IMU等のセンサー情報を元に、認知(⾃⼰位置推定・環境認識)、予測・判断(経路計画・経路追従)、操作(ステアリング・アクセル・ブレーキ)を⼈間のドライバーに代わって⾏います。
ティアフォーが開発をリードするAutowareもドライバーを代替することを⽬指しており、大きく分けて以下の7つの機能があります(詳細は開発プラットフォームであるGitHub参照)。
SENSING
LiDAR、カメラ、GNSSといった外界センサーや、IMU等の内界センサーから情報を集め、処理が⾏える形に加⼯。
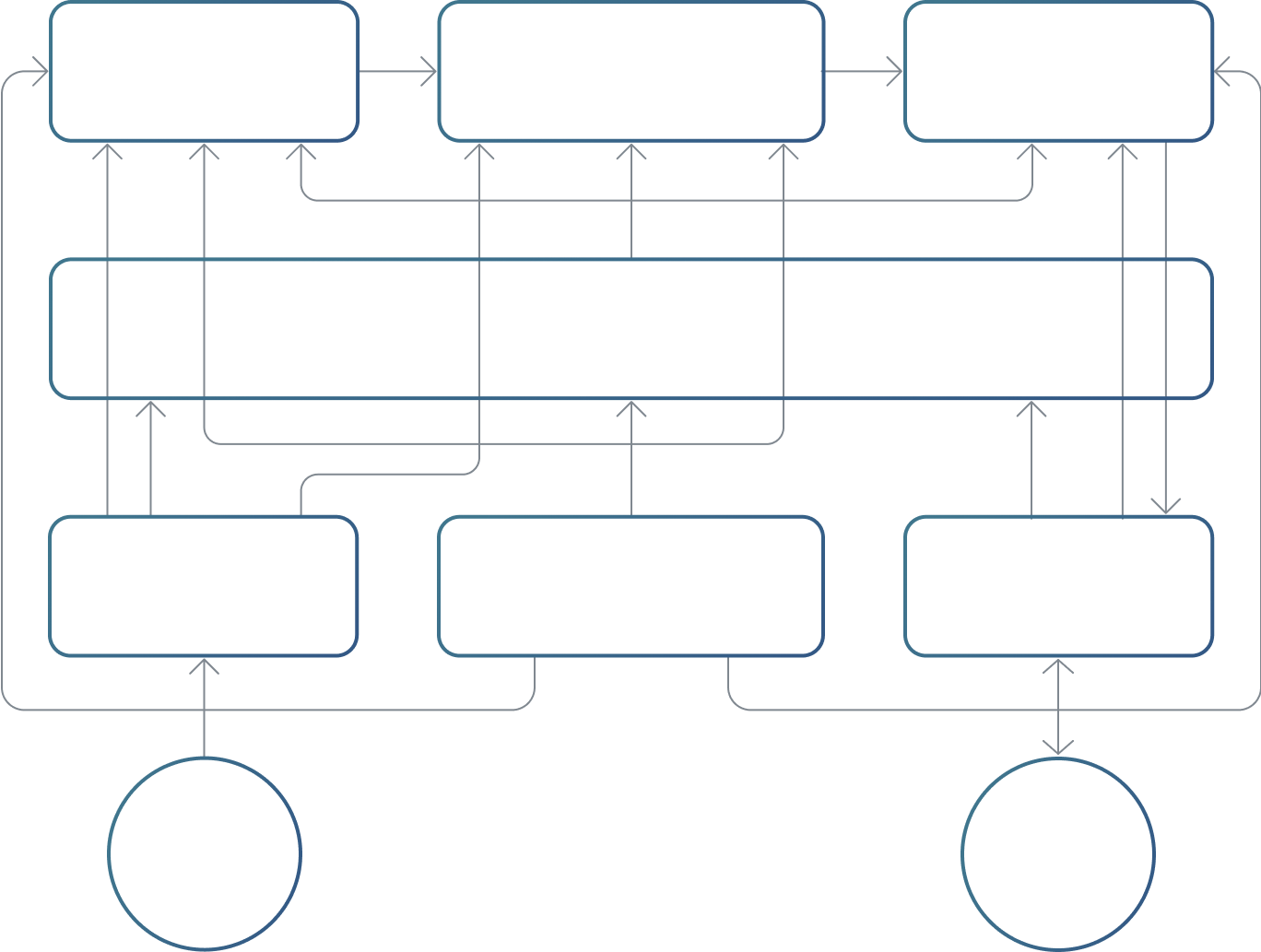
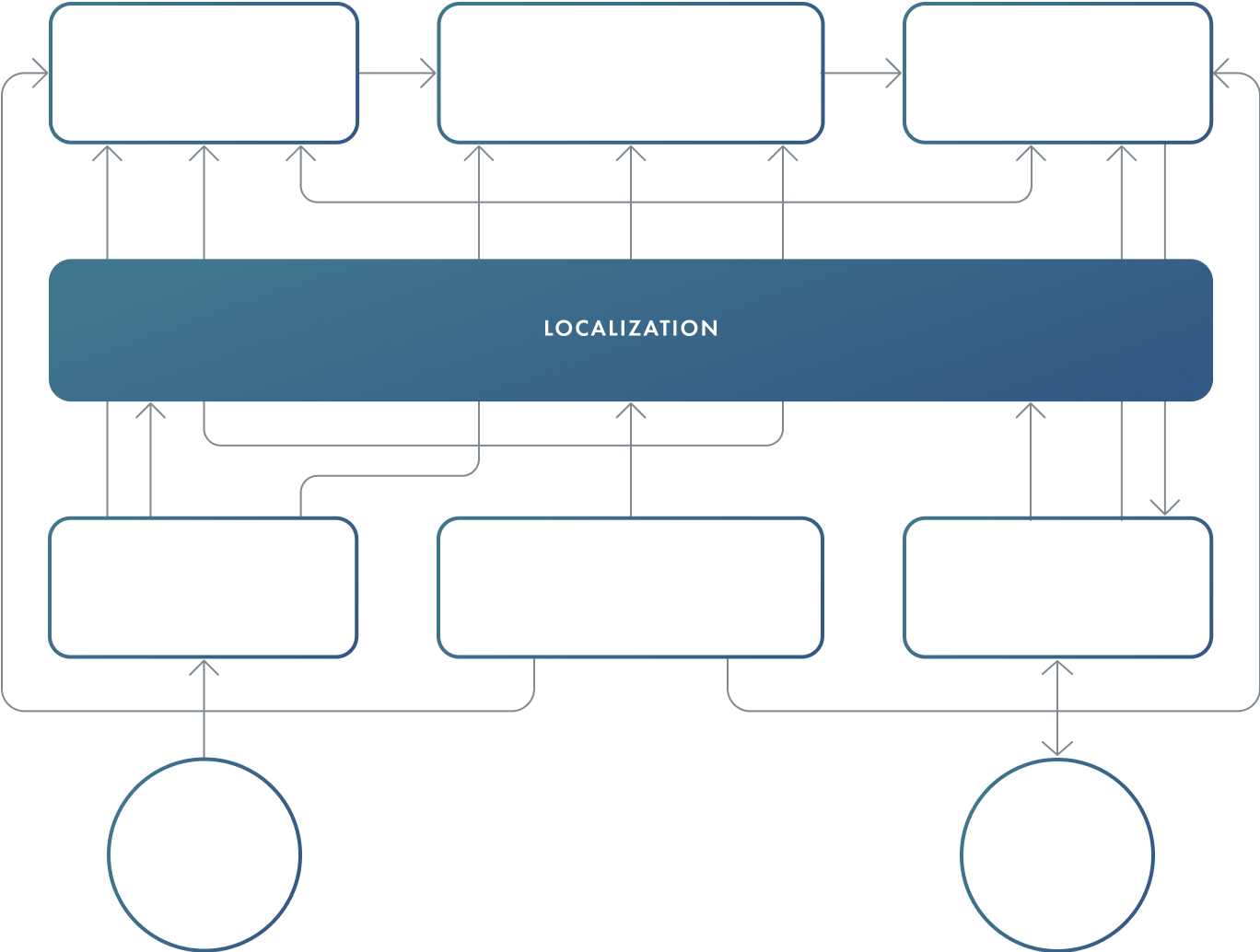
LOCALIZATION
⾼精度3次元地図とLIDARデータの照合結果、IMUあるいはGNSSの測位結果を統合し、⾃⾞の位置姿勢を推定。
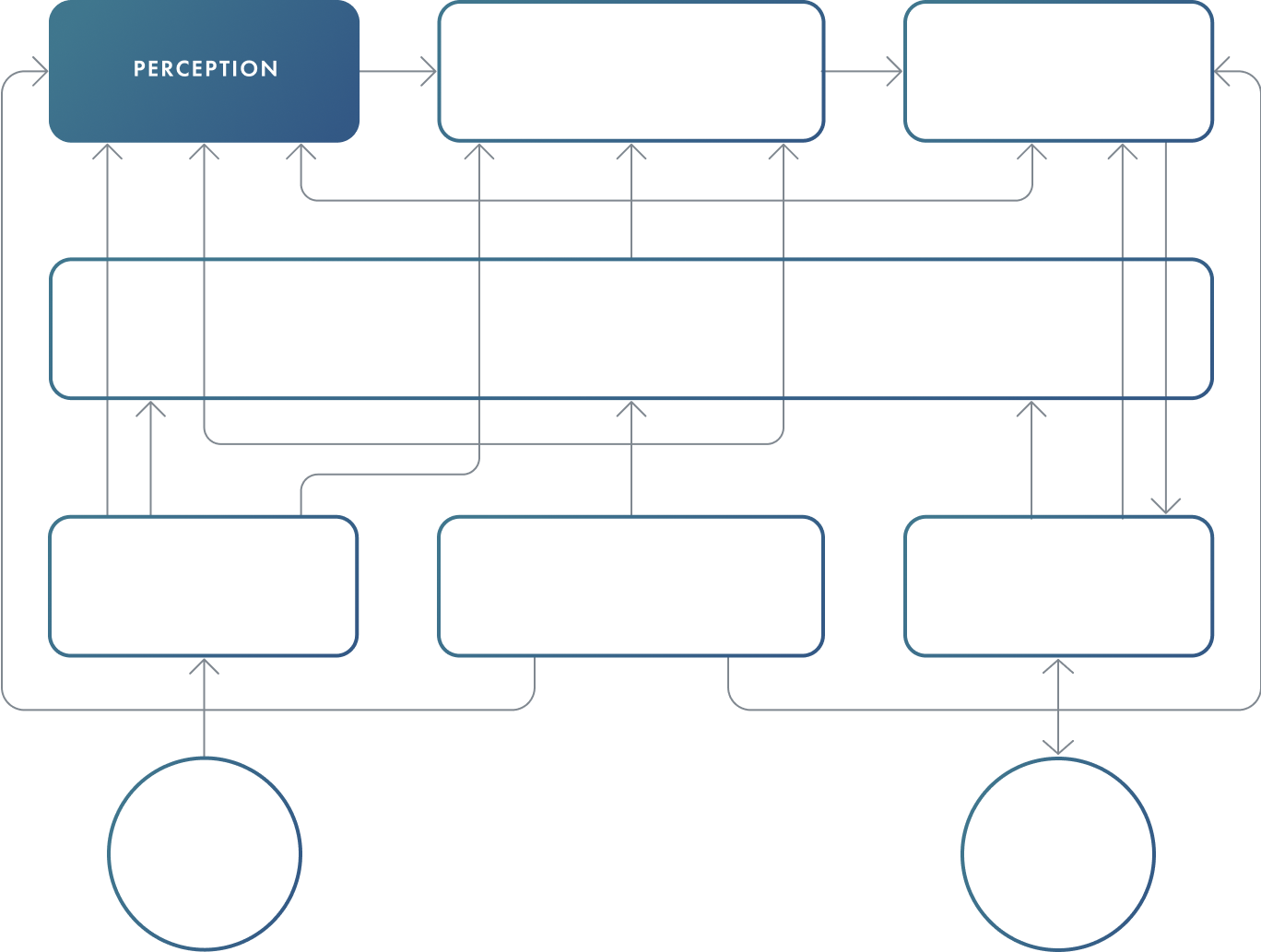
PERCEPTION
物体認識や時系列での追跡、⾏動予測、信号認識。
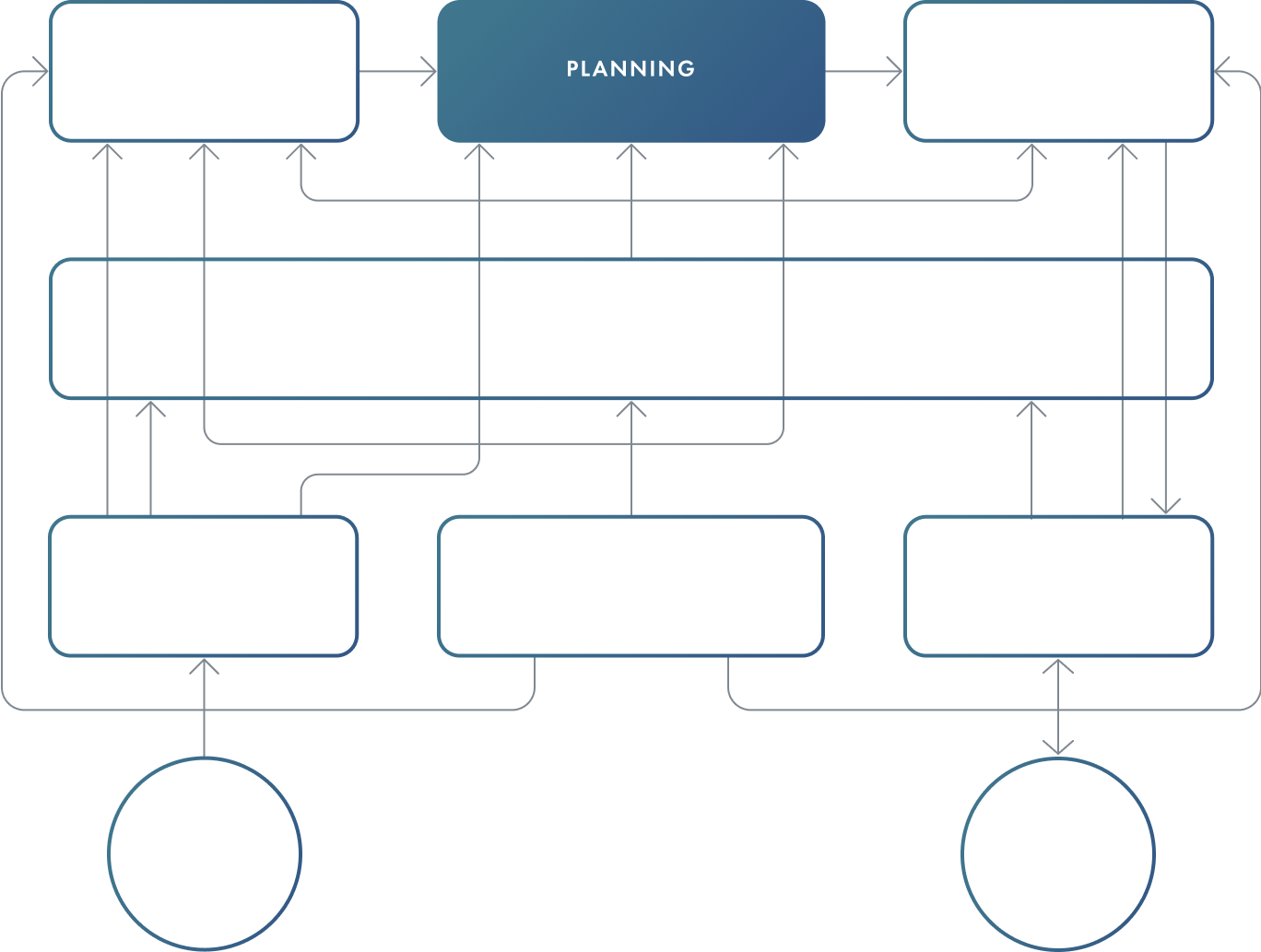
PLANNING
障害物回避や駐⾞計画を含め、⾃⾞の現在地からゴールまでの経路を計画。
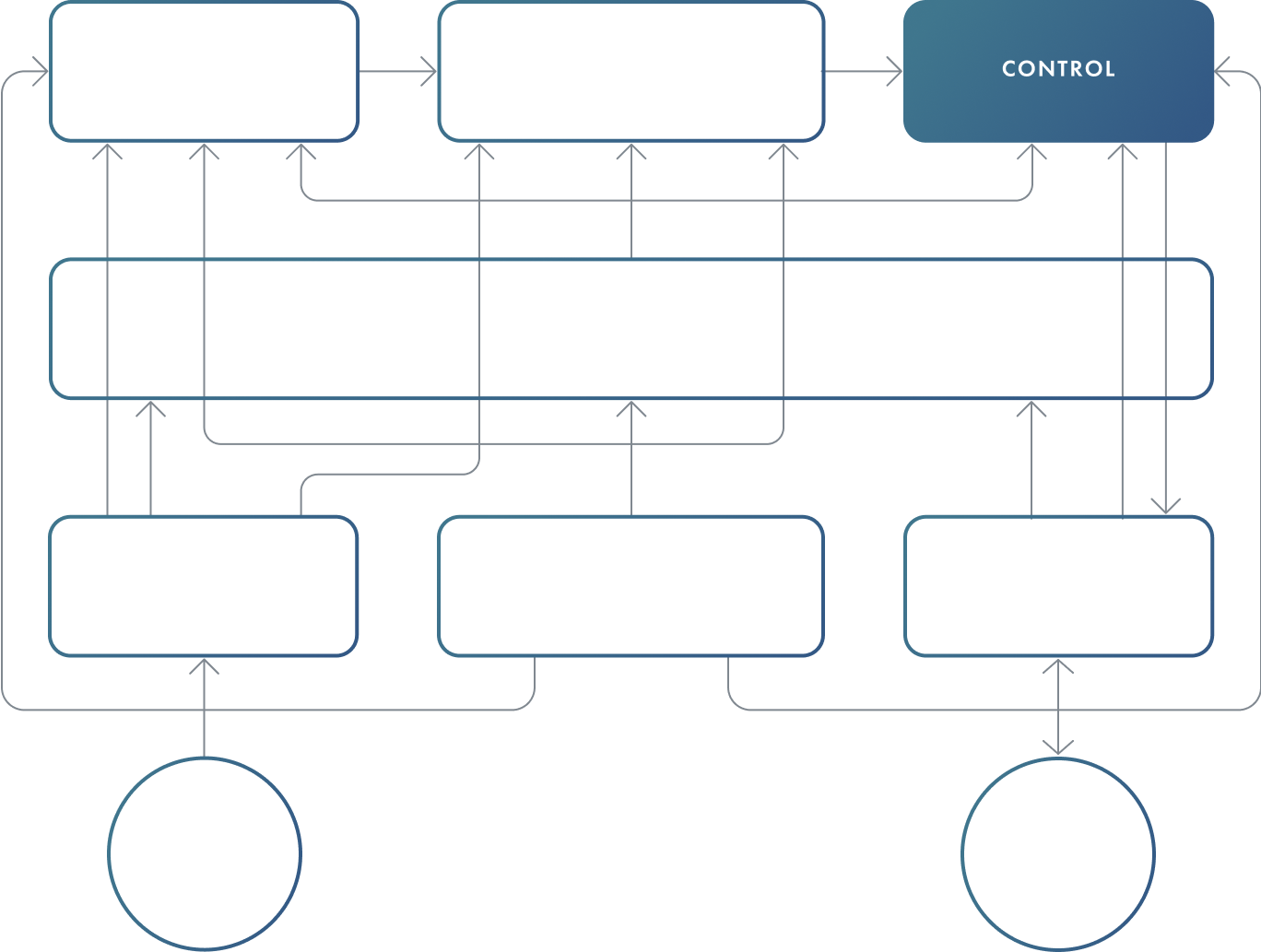
CONTROL
計画された経路に沿って⾛るための⾞両への制御信号を⽣成。
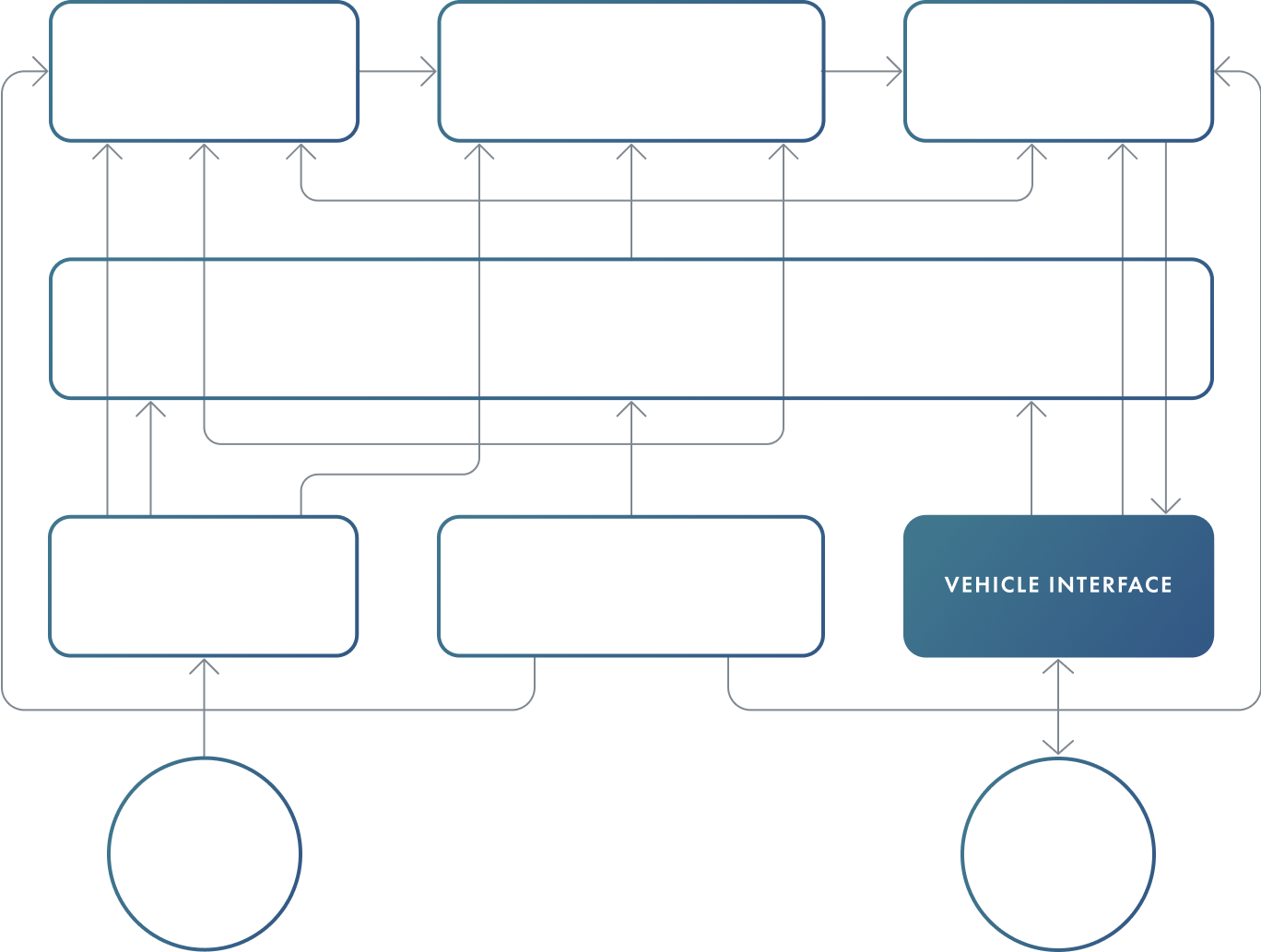
VEHICLE INTERFACE
上記の制御信号を、様々な⾞両特性に応じた指令値へ変換。
MAP DATA
地図情報に環境データを加えた⾼精度3次元地図を使⽤。